We have a wide research profile and most of our activities belong to one of the following areas:

Vision

RGBD Perception

Laser Scanning

Agriculture Robotics

UAVs

Service Robotics
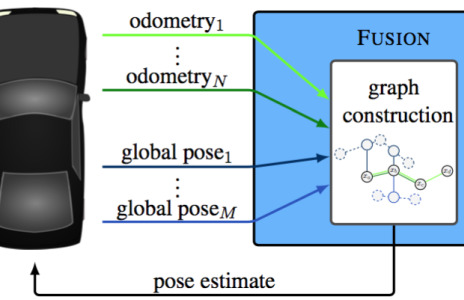
State Estimation
for Autonomous Driving

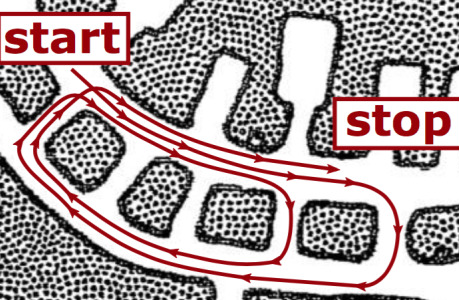
Simultaneous Localization
and Mapping

Autonomous Exploration
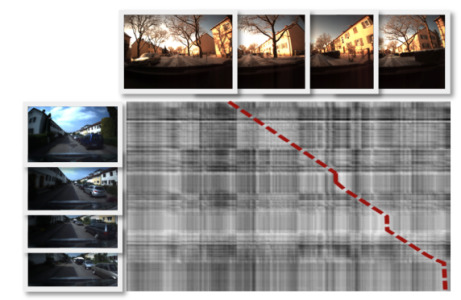
Localization & Place Recognition
Navigation

Multi-Robot Coordination

Scene Interpretation

Classification
